Аппаратный пид регулятор. П, ПД, ПИ, ПИД регуляторы
В данной статье приведены основные принципы и правила настройки коэффициентов ПИД-регулятора сточки зрения практического применения. Теоретические основы можно прочитать .
Для простоты изложения рассмотрим настройку регулятора на примере. Допустим, необходимо поддерживать температуру в помещении с помощью обогревателя, управляемого регулятором. Для измерения текущей температуры используем термопару.
Задача настройки
Настройка регулятора производится с одной единственной целью: подобрать его коэффициенты для данной задачи таким образом, чтобы регулятор поддерживал величину физического параметра на заданном уровне. В нашем примере физическая величина — это температура.
Допустим текущая температура в помещении 10 °С, а мы хотим, чтобы было 25°С. Мы включаем регулятор и он начинает управлять мощностью обогревателя таким образом, чтобы температура достигла требуемого уровня. Посмотрим как это может выглядеть.
На данном рисунке красным цветом показана идеальная кривая изменения температуры в помещении при работе регулятора. Физическая величина плавно, без скачков, но в тоже время достаточно быстро подходит к заданному значению. Оптимальное время, за которое температура может достигнуть заданной отметки, определить довольно сложно. Оно зависит от многих параметров: размеров комнаты, мощности обогревателя и др. В теории это время можно рассчитать, но на практике чаще всего это определяется экспериментально.
Чёрным цветом показан график изменения температуры в том случае, если коэффициенты подобраны совсем плохо. Система теряет устойчивость. Регулятор при этом идёт «в разнос» и температура «уходит» от заданного значения.
Рассмотрим более благоприятные случаи.
 На этом рисунке показаны графики, далёкие от идеального. В первом случае наблюдается сильное перерегулирование: температура слишком долго «скачет» относительно уставки, прежде чем достичь её. Во втором случае регулирование происходит плавно, но слишком медленно.
На этом рисунке показаны графики, далёкие от идеального. В первом случае наблюдается сильное перерегулирование: температура слишком долго «скачет» относительно уставки, прежде чем достичь её. Во втором случае регулирование происходит плавно, но слишком медленно.
А вот и приемлемые кривые:
 Данные кривые тоже не идеальны, но могут быть сочтены за удовлетворительные.
Данные кривые тоже не идеальны, но могут быть сочтены за удовлетворительные.
В процессе настройки регулятора, пользователю необходимо стремиться получить кривую, близкую к идеальной. Однако, в реальных условиях сделать это не так-то просто — приходится долго и мучительно подбирать коэффициенты. Поэтому зачастую останавливаются на «приемлемой» кривой регулирования. Например, в нашем примере нас могли бы устроить коэффициенты регулятора, при которых заданная температура достигалась бы за 15-20 минут с максимальным перерегулированием (максимальными «скачками» температуры) 2 °С. А вот время достижение уставки более часа и максимальные «скачки» температуры 5 °С — нас бы не устроили.
Настраиваем пропорциональный коэффициент
Выставляем дифференциальный и интегральный коэффициенты в ноль, тем самым убирая соответствующие составляющие. Пропорциональный коэффициент выставляем в 1.
Далее нужно задать значение уставки температуры отличное от текущей и посмотреть, как регулятор будет менять мощность обогревателя, чтобы достичь заданного значения. Характер изменения можно отследить «визуально», если у вас получится мысленно представить этот график. Либо можно регистрировать в таблицу измеренное значение температуры каждые 5-10 секунд и по полученным значением построить график. Затем нужно проанализировать полученную зависимость в соответствии с рисунком:
 При большом перерегулировании, необходимо уменьшать пропорциональный коэффициент, а если регулятор долго достигает уставки — увеличивать. Так убавляя-прибавляя коэффициент необходимо получить график регулирования как можно ближе к идеальному. Поскольку достичь идеала удастся вряд ли, лучше оставить небольшое перерегулирование (его можно будет скорректировать другими коэффициентами), чем длительное нарастание графика.
При большом перерегулировании, необходимо уменьшать пропорциональный коэффициент, а если регулятор долго достигает уставки — увеличивать. Так убавляя-прибавляя коэффициент необходимо получить график регулирования как можно ближе к идеальному. Поскольку достичь идеала удастся вряд ли, лучше оставить небольшое перерегулирование (его можно будет скорректировать другими коэффициентами), чем длительное нарастание графика.
Настраиваем дифференциальный коэффициент
Постепенно увеличивая дифференциальную составляющую, необходимо добиться уменьшения или полного исчезновения «скачков» графика (перерегулирования) перед выходом на уставку. При этом кривая должна стать еще больше похожа на идеальную. Если слишком сильно завысить дифференциальный коэффициент, температура при выходе на уставку будет расти не плавно, а скачками (как показано на рисунке).

При появлении таких скачков необходимо прекратить увеличение дифференциального коэффициента.
Настраиваем интегральный коэффициент
При настройке двух предыдущих коэффициентов можно получить практически идеальную кривую регулирования или близкую к ней кривую, удовлетворяющую условиям задачи. Однако, как правило возникает так называемая «статическая ошибка». При этом в нашем примере температура стабилизируется не на заданном значении 25 °С, а на несколько меньшем значении. Дело в том, что если температура станет равной уставке (то есть разность текущей и заданной температур станет равна 0), то пропорциональная и дифференциальная составляющая будут равны нулю (). При этом мощность регулятора тоже станет равна 0 и он начнёт остывать.

Для того чтобы исключить этот эффект, используют интегральную составляющую. Её необходимо постепенно увеличивать до исчезновение статической ошибки. Однако, чрезмерное её увеличение тоже может привести к возникновению скачков температуры.
Заключение
Настройка ПИД-регулятора довольно сложный и трудоёмкий процесс. На практике достаточно тяжело достичь оптимального регулирования и зачастую в этом нет необходимости. Чаще всего достаточно добиться такого вида переходного процесса, который устроит пользователя в условиях текущей задачи.
П, ПД, ПИ, ПИД регуляторы. Они же P, PD, PI, PID регуляторы.
Во первых, упомянем, что сами понятия П, ПД, ПИ, ПИД (P, PD, PI, PID) регуляторы являются неким сокращением от понятия: "устройство регулирования () обеспечивающие на своем выходе регулируемого параметра, или его изменения, описываемую типа П, ПИ и т.д....... ". При этом:
- П, (P) - означает "пропорциональный"
- И(I) - "интегральный"
- Д(D) - "дифференциальный"
- ПИ (PI) - "пропорциональный и интегральный"
- ПД (PD) - "пропорциональный и дифференциальный"
- ПИД (PID) - "пропорциональный, интегральный и дифференциальный"
Очень важное замечание - в подавляющем большинстве случаев эти регуляторы обеспечивают изменения регулируемого параметра на регулирующий параметр (воздействие). Для ясности в данной статье мы будем говорить о регулировании комнатной температуры (поддержании ее значения X градусов) с помощью некоего комнатного электронагревателя, выходная мощность которого зависит от уровня входного сигнала. Т.е. при изменении температуры на некую положительную величину e (при повышении температуры до уровня X+e ) к стандартному входному сигналу U нагревателя будет добавлен отрицательный сигнал регулятора u . Результирующим сигналом на входе нагревателя будет, таким образом, U-u , что уменьшит выходную мощность нагревателя, и, следовательно, комнатную температуру.
Очень часто e называют "ошибкой" или "отклонением", Х - "заданным уровнем" или "заданным значением", причем Х , в общем случае, может быть и регулируемым сигналом в каком-то другом контуре регулирования. ! Во избежания автоколебательных явлений желательно, чтобы "верхний" контур регулирования был "медленным" по отношению к нижнему!
Рассмотрим работу ПИД (PID) регулятора , как наиболее универсального представителя класса. Любой другой может быть получен путем обнуления коэффициента передачи при соответствующем слагаемом передаточной функции. Итак,
Передаточная функция ПИД регулятора описывается уравнением:
где "тау" - время с того момента, как изменение e регулируемой величины стало отличным от нуля (значимо отличным), а жаргон инженеров-автоматчиков еще требует нижеследующих названий для компонент уравнения и их производных величин:
- Kp - пропорциональный коэффициент усиления
- Pb=1/Kp - относительный диапазон регулирования
- Ki - интегральный коэффициент усиления
- Ti=1/Ki - постоянная интегрирования (размерность - время)
- Kd - дифференциальный коэффициент усиления
- Td=Kd - постоянная дифференицирования (размерность - время)
Очевидно, что функция содержит 3 слагаемых, первое - пропорциональное к изменению заданного параметра, второе - интегральное, а третье - дифференциальное. В дальнейшем будем использовать в рассуждениях обозначения из уравнения (2). Рассмотрим, что это такое по порядку:
Пропорциональное регулирование (П или P регуляторы) : - величина поправки в регулирующее воздействие пропорциональна величине отклонения. Логично, чем больше отклонение температуры в компате от заданного уровня, тем сильнее следует изменить мощность нагревателя для компенсации изменения. u(t)=P (коэффициенты Kd и Ki уравнения (2) равны нулю).
Интегральное регулирование: - величина поправки в регулирующее воздействие зависит от накопленного действия отклонения регулируемой величины. Спокойно, тут ничего нет сложного. Рассмотрим наш пример -если в комнате низкая температура недопустима, ибо на подоконнике находятся ценные теплолюбивые кактусы, а какой-то клоун открыл окно зимой, то пропорциональное регулирование в силу разумности своих настроек попросту не позволяет прогреть комнату. Если накопленное действие пониженной температуры растет (интеграл от изменения) , то это слагаемое даст дополнительное приращение мощности нагревателя.
Дифференциальное регулирование: - величина поправки в регулирующее воздействие зависит от скорости изменения регулируемого параметра. Тут ничего сложного нет, поскольку - если, например, температура на улице резко упала, то лучше поскорее прогреть комнату и стены, и не дать им набрать влажность. ! В гидравлических системах и в системах, имеющих собственные частоты колебаний близкие к характерным временам запуска процессов регулирования, данный вид регулирования малоприменим, так как легко вызывает гироудары или резонансы!
ПД или PD регуляторы, описать просто: Передаточная функция П (P) регулятора описывается уравнением: u(t)=P+D
ПИ или PI регуляторы описываются тоже просто: Передаточная функция П (P) регулятора описывается уравнением: u(t)=P+I (коэффициент Ki уравнения (2) равен нулю).
Уравнение (2), для целей упрощения настройки часто может быть записано как:

тут нет никакого подвоха, все то же самое, просто другая запись.
Основная задача контроллера холодильника – поддержание в камере заданной температуры. Делать это будет регулятор температуры за счет изменения электрической мощности на модуле Пельтье.
В предыдущем уроке мы разработали регулятор мощности. Связь регуляторов мощности и температуры выглядит так.
- Регулятор температуры получает измеренную температуру, сравнивает ее с заданной температурой и вычисляет значение заданной мощности для регулятора мощности.
- Регулятор мощности формирует ШИМ, соответствующий заданной мощности.
Регулятор мощности мы построили по интегральному закону регулирования. Для стабилизации температуры будем использовать более сложный алгоритм управления – пропорционально-интегрально-дифференцирующий (ПИД) регулятор.
ПИД регулятор.
В предыдущем уроке я подробно рассказал об . Подчеркнул его достоинства и недостатки.
Регулятор, работающий по такому принципу, обладает высокой точностью. Остальные критерии качества регулирования – быстродействие и устойчивость - у него не на высоте.
Для того чтобы добиться высоких показателей для всех критериев необходимо использовать регулятор, объединяющий в себе разные законы регулирования.
Именно таким устройством является пропорционально-интегрально-дифференцирующий (ПИД) регулятор. Он формирует выходной сигнал, являющийся суммой трех составляющих с разными передаточными характеристиками. Благодаря этому ПИД регулятор обеспечивает высокое качество регулирования и позволяет оптимизировать управление по отдельным критериям.
В формировании выходного сигнала ПИД регулятора участвуют:
- Пропорциональная составляющая – значение пропорционально ошибке рассогласования (разности заданного и реального значений регулируемого параметра).
- Интегрирующая составляющая – интеграл ошибки рассогласования.
- Дифференцирующая составляющая – производная ошибки рассогласования.
Математическая форма записи закона ПИД регулятора имеет вид:
o(t) = P + I + D = K p e(t) + K i ∫e(t)dt + K d de(t)/dt
- o(t) – выходной сигнал;
- P – пропорциональная составляющая;
- I – интегрирующая составляющая;
- D – дифференцирующая составляющая;
- Kp, Ki, Kd – коэффициенты пропорционального, интегрирующего, дифференцирующего звеньев;
- e(t) – ошибка рассогласования.
В схематичном виде ПИД регулятор можно представить так.
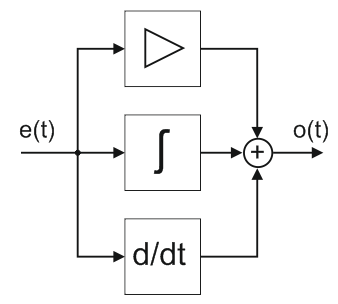
Структурная схема ПИД регулятора напряжения U выглядит так.

- Измеренное напряжение Ureal(t) вычитается из заданного Uset.
- Полученная ошибка рассогласования e(t) поступает на пропорциональное, интегрирующее и дифференцирующее звенья.
- В результате суммы составляющих получается управляющее воздействие o(t), которое подается на регулирующий элемент.
При программной реализации ПИД регулятора вычисления выходного сигнала происходят через равные промежутки времени. Т.е. регулятор является дискретным по времени. Поэтому, далее я буду употреблять выражения: предыдущее состояние сигнала, предыдущее значение и т.п. Речь идет о состоянии системы в предыдущей точке временной дискретизации.
Составляющие ПИД регулятора.
Еще раз. Выходной сигнал ПИД регулятора это сумма трех составляющих:
- пропорциональной;
- интегрирующей;
- дифференцирующей.
Пропорциональная составляющая.
P(t) = K p * e(t)
Не имеет памяти, т.е. значение выходного сигнала не зависит от предыдущего состояния системы. Просто ошибка рассогласования, умноженная на коэффициент, передается на выход. Выходной сигнал компенсирует отклонение регулируемого параметра. Сигнал тем больше, чем больше ошибка рассогласования. При ошибке равной 0, сигнал на выходе тоже равен 0.
Пропорциональная составляющая не способна компенсировать ошибку полностью. Это видно из формулы. Выходной сигнал в Kp раз больше ошибки. Если ошибка рассогласования равна 0, то и выходной сигнал регулятора равен 0. А тогда и компенсировать нечем.
Поэтому в пропорциональных регуляторах всегда существует так называемая статическая ошибка. Уменьшить ее можно за счет увеличения коэффициента Kp, но это может привести к снижению устойчивости системы и даже к автоколебаниям.
К недостаткам пропорциональных регуляторов следует отнести:
- наличие статической ошибки регулирования;
- невысокая устойчивость при увеличении коэффициента.
Есть весомое преимущество:
- Высокая скорость регулирования. Реакция пропорционального регулятора на ошибку рассогласования ограничена только временем дискретизации системы.
Регуляторы, работающие только по пропорциональному закону, применяют редко.
Главная задача пропорциональной составляющей в ПИД регуляторе – повысить быстродействие.
Интегрирующая составляющая.
I(t) = K i ∫e(t)dt
Пропорциональна интегралу ошибки рассогласования. С учетом временной дискретности регулятора можно написать так:
I(t) = I(t -1) + K i * e(t)
- I(t-1) – значение I в предыдущей точке временной дискретизации.
Ошибка рассогласования умножается на коэффициент и прибавляется к предыдущему значению интегрирующего звена. Т.е. выходной сигнал все время накапливается и со временем увеличивает свое воздействие на объект. Таким образом, ошибка рассогласования полностью компенсируется даже при малых значениях ошибки и коэффициента Ki. В установившемся состоянии выходной сигнал регулятора полностью обеспечивается интегрирующей составляющей.
К недостаткам интегрального регулятора следует отнести:
- низкое быстродействие;
- посредственная устойчивость.
Достоинство:
- Способность полностью компенсировать ошибку рассогласования при любом коэффициенте усиления.
На практике часто используют интегрирующие регуляторы (только интегрирующая составляющая) и пропорционально-интегрирующие (интегрирующая и пропорциональная составляющие).
Главная задача интегрирующего звена в ПИД регуляторе – компенсация статической ошибки, обеспечение высокой точности регулирования.
Дифференцирующая составляющая.
D(t) = K d de(t)/dt
Пропорциональна скорости изменения ошибки рассогласования. Своеобразный показатель ускорения ошибки рассогласования. Дифференцирующая составляющая предсказывает отклонения регулируемого параметра в будущем и противодействует этому отклонению. Как правило, она компенсирует запаздывания воздействия регулятора на объект и повышает устойчивость системы.
С учетом временной дискретности регулятора дифференцирующую составляющую можно вычислить так:
D(t) = K d * (e(t) - e(t -1))
Она показывает, насколько изменилось значение ошибки рассогласования за одну временную единицу дискретности регулятора.
Регуляторов, состоящих из единственного дифференцирующего звена, не бывает.
Главная задача дифференцирующего звена в ПИД регуляторе – повышение устойчивости.
Настройка ПИД регулятора.
Качество регулирования ПИД регуляторов в значительной мере зависит от того, насколько оптимально выбраны коэффициенты. Коэффициенты ПИД регулятора определяются на практике в системе с реальным объектом путем подбора. Существуют разные методики настройки. Я расскажу только об общих принципах.
О качестве регулирования судят по переходной характеристике регулятора. Т.е. по графику изменения регулируемого параметра во времени.
К традиционным пунктам последовательности настройки ПИД регулятора я бы добавил, что, прежде всего, надо определиться какие критерии качества регулирования предпочтительнее.
В предыдущем уроке при разработке регулятора мощности нас в первую очередь интересовали точность и устойчивость. А быстродействие мы даже искусственно снизили. Какие-то регуляторы работают в условиях значительных помех и им важнее устойчивость, от других требуется высокое быстродействие даже в ущерб точности. Критерии оптимизации могут быть разными. В общем случае ПИД регуляторы настраивают для обеспечения всех критериев качества регулирования на высоком уровне.
Составляющие ПИД регулятора настраиваются отдельно.
- Отключается интегрирующее и дифференцирующее звенья и выбирается коэффициент пропорционального звена. Если регулятор пропорционально-интегрирующий (отсутствует дифференцирующее звено), то добиваются полного отсутствия колебаний на переходной характеристике. При настройке регулятора на высокое быстродействие колебания могут остаться. Их попытается скомпенсировать дифференцирующее звено.
- Подключается дифференцирующее звено. Его коэффициентом стремятся убрать колебания параметра регулирования. Если не удается, то уменьшают пропорциональный коэффициент.
- За счет интегрирующего звена убирают остаточную ошибку рассогласования.
Настройка ПИД регулятора носит итерационный характер. Т.е. пункты подбора коэффициентов могут многократно повторяться до тех пор, пока не будет достигнут приемлемый результат.
Благодаря высоким характеристикам и универсальности ПИД регуляторы широко применяются в системах автоматизации производства.
В следующем уроке будем разрабатывать ПИД регулятор температуры.
Настройка регуляторов
Связи между показателями качества
Описанные выше показатели качества связаны между собой примерными соотношениями, справедливыми только для систем не выше второго порядка:
; t p = ; ; M = .
Для регулирования объектами управления, как правило, используют типовые регуляторы, которые можно разделить на аналоговые и дискретные. К дискретным регуляторам относятся импульсные, релейные и цифровые. Аналоговые реализуют типовые законы регулирования, названия которых соответствуют названиям типовых звеньев.
Входным сигналом для аналоговых регуляторов является величина ошибки регулирования, которая определяется как разность между заданным и текущим значениями регулируемого параметра (e = х - у). Выходным сигналом является величина управляющего воздействия u, подаваемая на объект управления. Преобразование входного сигнала в выходной производится согласно типовым законам регулирования, рассматриваемым ниже.
1) П-закон (пропорциональное регулирование) . Согласно закон пропорционального регулирования управляющее воздействие должно быть пропорционально величине ошибки. Например, если регулируемый параметр начинает отклоняться от заданного значения, то воздействие на объект следует увеличивать в соответствующую сторону. Коэффициент пропорциональности часто обозначают как K 1:
Тогда передаточная функция П-регулятора имеет вид
W П (s) = K 1 .
Если величина ошибки стала равна, например, единице, то управляющее воздействие станет равным K 1 (см. рисунок 1.52).
 |
Рисунок 1.52
 Примером системы с П-регулятором может служить система автоматического наполнения емкости (сливной бачок). На рисунке 1.53 обозначены:
Примером системы с П-регулятором может служить система автоматического наполнения емкости (сливной бачок). На рисунке 1.53 обозначены:
L и L зад - текущий уровень в емкости (регулируемая величина) и его заданная величина,
F пр и F сток - расходы жидкости притекающей и стекающей из емкости.
Управляющим воздействием является F пр. F сток - возмущение.
Принцип действия понятен из рисунка: при опустошении емкости поплавок через кронштейн открывает задвижку подачи жидкости. Причем, чем больше разница уровней е = L зад - L, тем ниже поплавок, тем больше открыта задвижка и, соответственно, больше поток жидкости F пр. По мере наполнения емкости ошибка уменьшается до нуля и, соответственно, уменьшается F пр до полного прекращения подачи. То есть F пр = K 1 . (L зад - L).
Достоинство данного принципа регулирования в быстродействии. Недостаток - в наличии статической ошибки в системе. Например, если жидкость вытекает из емкости постоянно, то уровень всегда будет меньше заданного.
2) И-закон (интегральное регулирование) . Управляющее воздействие пропорционально интегралу от ошибки. То есть чем дольше существует отклонение регулируемого параметра от заданного значения, тем больше управляющее воздействие:
![]() .
.
Передаточная функция И-регулятора:
При возникновении ошибки управляющее воздействие начинает увеличиваться со скоростью, пропорциональной величине ошибки. Например, при е = 1 скорость будет равна K 0 (см. рисунок 1.54).
 |
Рисунок 1.54
Достоинство данного принципа регулирования в отсутствии статической ошибки, т.е. при возникновении ошибки регулятор будет увеличивать управляющее воздействие, пока не добьется заданного значения регулируемой величины. Недостаток - в низком быстродействии.
3) Д-закон (дифференциальное регулирование) . Регулирование ведется по величине скорости изменения регулируемой величины:
То есть при быстром отклонении регулирующей величины управляющее воздействие по модулю будет больше. При медленном - меньше. Передаточная функция Д-регулятора:
W Д (s) = K 2 s.
Регулятор генерирует управляющее воздействие только при изменении регулируемой величины. Например, если ошибка имеет вид ступенчатого сигнала е = 1, то на выходе такого регулятора будет наблюдаться один импульс (d-функция). В этом заключается его недостаток, который обусловил отсутствие практического использования такого регулятора в чистом виде.
На практике типовые П-, И- и Д-законы регулирования редко используются в чистом виде. Чаще они комбинируются и реализуются в виде ПИ-регуляторов, ПД-регуляторов, ПИД-регуляторов и др.
ПИ-регулятор (пропорционально-интегральный регулятор) представляет собой два параллельно работающих регулятора: П- и И-регуляторы (см. рисунок 1.55). Данное соединение сочетает в себе достоинства обоих регуляторов: быстродействие и отсутствие статической ошибки.
ПИ-закон регулирования описывается уравнением

и передаточной функцией
W ПИ (s) = K 1 + .
То есть регулятор имеет два независимых параметра (настройки): K 0 - коэффициент интегральной части и K 1 - коэффициент пропорциональной.
 При возникновении ошибки е = 1 управляющее воздействие изменяется как показано на рисунке 1.56.
При возникновении ошибки е = 1 управляющее воздействие изменяется как показано на рисунке 1.56.
Рисунок 1.56
ПД-регулятор (пропорционально-дифференциальный регулятор) включает в себя П- и Д-регуляторы (см. рисунок 1.57). Данный закон регулирования описывается уравнением

![]()
и передаточной функцией:
W ПД (s) = K 1 + K 2 s.
Данный регулятор обладает самым большим быстродействием, но также и статической ошибкой. Реакция регулятора на единичное ступенчатое изменение ошибки показана на рисунке 1.58.
 |
Рисунок 1.58

ПИД-регулятор (пропорционально-интегрально-дифференциальный регулятор) можно представить как соединение трех параллельно работающих регуляторов (см. рисунок 1.59). Закон ПИД-регулирования описывается уравнением:
![]()
и передаточной функцией
W ПИД (s) = K 1 + + K 2 s.
ПИД-регулятор в отличие от других имеет три настройки: K 0 , K 1 и K 2 .
ПИД-регулятор используется достаточно часто, поскольку он сочетает в себе достоинства всех трех типовых регуляторов. Реакция регулятора на единичное ступенчатое изменение ошибки показана на рисунке 1.60.
 |
В данном разделе приведены описания алгоритмов работы и непрерывных П-, ПИ-, ПД-, ПИД-регуляторов с различными структурами выходного сигнала - аналоговым выходом, дискретным (импульсным) выходом или ШИМ-выходом (широтно импульсным модулированным сигналом).
Структурные схемы непрерывных регуляторов
В данном разделе приведены структурные схемы непрерывных регуляторов с аналоговым выходом -рис.2, с импульсным выходом - рис.3 и с ШИМ (широтно импульсным модулированным) выходом -рис.4.
В процессе работы система автоматического регулирования АР (регулятор) сравнивает текущее значение измеряемого параметра Х, полученного от датчика Д, с заданным значением (заданием SP) и устраняет рассогласование регулирования E (B=SP-PV). Внешние возмущающие воздействия Z также устраняются регулятором. Работа приведенных структурных схем отличается методом формирования выходного управляющего сигнала регулятора.
Непрерывный регулятор с аналоговым выходом
Структурная схема непрерывного регулятора с аналоговым выходом приведена на рис.2.
Выход Y регулятора АР (например, сигнал 0-20мА, 4-20мА, 0-5мА или 0-10В) воздействует через электропневматический Е/Р сигналов (например, с выходным сигналом 20-100кПа) или электропневматический позиционный регулятор на исполнительный элемент К (регулирующий орган).

Рисунок 2 - Структурная схема регулятора с аналоговым выходом
где:
АР - непрерывный ПИД-регулятор с аналоговым выходом,
Д - датчик,
НП - нормирующий преобразователь (в современных регуляторах является входным устройством)
Y - выходной аналоговый управляющий сигнал Е/Р - электропневматический преобразователь,
Непрерывный регулятор с импульсным выходом
Структурная схема непрерывного регулятора с импульсным выходом приведена на рис.3.
Выходные управляющие сигналы регулятора - сигналы Больше и Меньше (транзистор, реле, симистор) через контактные или бесконтактные управляющие устройства (П) воздействуют на исполнительный элемент К (регулирующий орган).

Рисунок 3 - Структурная схема регулятора с импульсным выходом
где:
АР - непрерывный ПИД-регулятор с импульсным выходом,
SP - узел формирования заданной точки,
PV=X- регулируемый технологический параметр,
Е - рассогласование регулятора,
Д - датчик,
НП - нормирующий преобразователь (в современных регуляторах является входным устройством) ИМП - импульсный ШИМ модулятор, преобразующий выходной сигнал Y в последовательность импульсов со скважностью, пропорциональной выходному сигналу: Q=\Y\/100. Сигналы Больше и Меньше - управляющие воздействия,
К - клапан регулирующий (регулирующий орган).
Непрерывный регулятор с ШИМ (широтно импульсным модулированным) выходом
Структурная схема непрерывного регулятора с ШИМ (широтно импульсным модулированным) выходом приведена на рис.4.
Выходной управляющий сигнал регулятора (транзистор, реле, симистор) через контактные или бесконтактные управляющие устройства (П) воздействуют на исполнительный элемент К (регулирующий орган).
Непрерывные регуляторы с ШИМ выходом широко применяются в системах регулирования температуры, где выходной управляющий симисторный элемент (или твердотельное реле, пускатель) воздействуют на термоэлектрический нагреватель ТЭН, или вентилятор.

Рисунок 4 - Структурная схема регулятора с ШИМ выходом
АР - непрерывный ПИД-регулятор с импульсным ШИМ выходом,
SP - узел формирования заданной точки,
PV=X- регулируемый технологический параметр,
Е - рассогласование регулятора,
Д - датчик,
НП - нормирующий преобразователь (в современных регуляторах является входным устройством) ШИМ - импульсный ШИМ модулятор, преобразующий выходной сигнал Y в последовательность импульсов со скважностью, пропорциональной выходному сигналу: Q=\Y\/100.
П - пускатель контактный или бесконтактный,
К - клапан регулирующий (регулирующий орган).
Согласование выходных устройств непрерывных регуляторов
В ыходной сигнал регулятора должен быть согласован с исполнительным механизмом и исполнительным устройством.
В соответствии с видом привода и исполнительным механизмом необходимо использовать выходное устройство непрерывного регулятора соответствующего типа, см. таблицу 1.
Таблица 1 - Согласование выходных устройств непрерывных регуляторов
| Выходное устройство непрерывного регулятора | Тип выходного устройства | Исполнительный механизм или устройство | Вид привода | Регулирующий орган | |
|---|---|---|---|---|---|
| Аналоговый выход | ЦАП с выходом 0-5мА, 0-20мА, 4-20мА, 0-10В | П-, ПИ-,ПД-, ПИД-закон | Преобразователи и позиционные регуляторы электро-пневматические и гидравлические | Пневматические исполнительные приводы (с сжатым воздухом в качестве вспомогательной энергии) и электропневматические преобразователи сигналов или электропневматические позиционные регуляторы, электрические (частотные привода) | |
| Импульсный выход | Транзистор, реле, симистор | П-, ПИ-, ПД-, ПИД-закон | Электрические приводы (с редуктором), в т. ч. реверсивные | ||
| ШИМ выход | Транзистор, реле, симистор | П-, ПИ-, ПД-, ПИД-закон | Контактные (реле) и бесконтактные (симисторные) пускатели | Термоэлектрический нагреватель(ТЭН) и др. |
Реакция регулятора на единичное ступенчатое воздействие
Если на вход регулятора подается скачкообразная функция изменения заданной точки - см. рис. 5, то на выходе регулятора возникает реакция на единичное ступенчатое воздействие в соответствии с характеристикой регулятора в функции времени.
Mozilla Firefox – мощный и удобный браузер, функционал которого можно значительно расширить за счет специальных дополнений, которые можно загрузить из магазина, встроенного в браузер. В этой статье я хочу вам рассказать о дополнении Speed Dial – удобной и
С расширением dmg чаще всего встречаются пользователи операционной системы Mac OS. Файл dmg представляет собой классический образ диска. В файле с текущим расширением могут храниться любые данные по аналогии с . Дополнительно нужно . Данная статья расскаж
Существует такое мнение, что лучше купить прошлогодний флагман, чем новую модель среднего класса. В мире Android-смартфонов это правило работает безотказно, но можно ли его применить к царству Apple? Для этого мы взяли прошлогодний iPhone X и новейший iPh






